

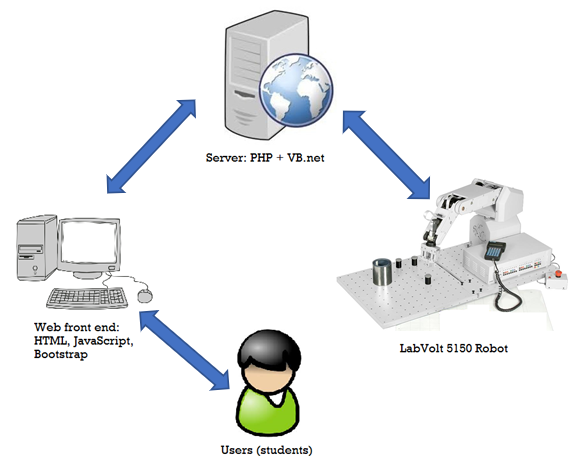
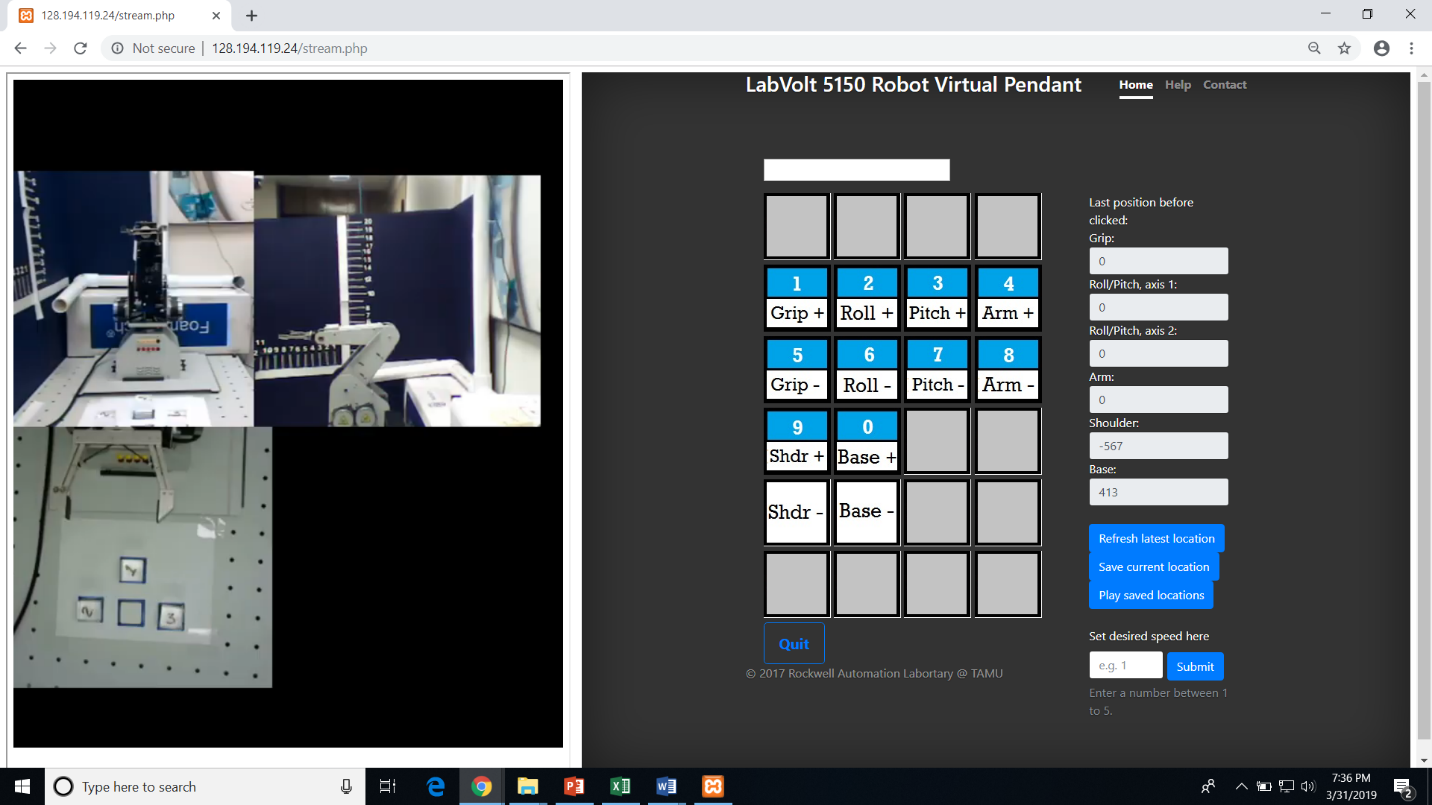
In industrial robotics education,students often do not have sufficient opportunities to practice skills such as robot programming due to large class sizes, limited lab time, and the cost of robots. There is an urgent need for engineers with industrial robot knowledge and programming as part of their skill set. A teach pendant is a commonly used and inexpensive method of programming industrial robots. This project describes the development of a virtual teach pendant and web server that enables students to do lab exercises remotely. The lab exercises allow students to become familiar with robot anatomy (joints and links), practice robot motion planning, and program a robot remotely to complete simple assembly tasks such as pick-and-place. The system can also be used for presentations on robot anatomy, programming methods, and design of remotely controllable robotic systems. The system has been evaluated by high school and undergraduate students at two- and four-year institutions with positive results.
The links below lead to some of the courseware that has been developed as part of this effort.
1. How the remote articulated robot works
2. Related Materials
a. Remote Robot System in Action b. Robot System Development in Detail c. Lab #1: Multi-Camera Monitoring and Remote Control Web
Page Design d. Lab #2:
Remote Control of LabVolt Robot Return to Dr. Hsieh's Home Page
The Remote Articualted Robot
was developed as part of a National Science Foundation project funded under Grant No.
1304843. Any opinions, findings, and conclusions or
recommendations expressed in this material are those of the author and
do not necessarily reflect the views of the National Science Foundation.
Last updated on November 25, 2019 by Sheng-Jen
("Tony") Hsieh